The main objectives of Precision Fish Farming (PFF) are to\r\n1) improve accuracy, precision and repeatability in farming operations; 2)\r\nfacilitate more autonomous and continuous biomass/animal mon...

The main objectives of Precision Fish Farming (PFF) are to\r\n1) improve accuracy, precision and repeatability in farming operations; 2)\r\nfacilitate more autonomous and continuous biomass/animal monitoring; 3) provide\r\nmore reliable decision support; and 4) reduce dependencies on manual labor and\r\nsubjective assessments, and thus improve staff safety. Through these means, PFF\r\nwill improve animal health and welfare while increasing the productivity, yield\r\nand environmental sustainability in commercial intensive aquaculture.
In defining PFF, it helps to envision fish farming as\r\nseveral cyclical operational processes realized in four phases where\r\nbio-responses in the cage are observed (observe phase) and interpreted\r\n(interpret phase), resulting in a foundation for making decisions (decide\r\nphase) on which actions to enforce (act phase) that in turn elicit a\r\nbio-response in the fish (Fig. 1). Similar cyclic concepts have been used to\r\ndescribe processes and products in other manufacturing industries.
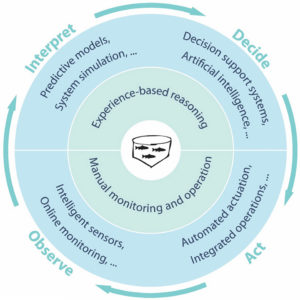
Fig. 1: A cyclical representation of PFF where operational\r\nprocesses are considered to consist of four phases: observe, interpret, decide\r\nand act. The inner cycle represents the present state-of-the-art in industry,\r\nwith manual actions and monitoring, and experience-based interpretation and\r\ndecision-making. The outer cycle illustrates how the introduction of PFF may\r\ninfluence the different phases of the cycle. Credit: Andreas Myskja Lien,\r\nSINTEF Ocean.
Today, most tasks pertaining to the different phases are\r\nconducted manually (i.e. close to the center in Fig. 1). First, the farmer\r\nobserves the fish via direct visual observation or with data acquisition tools\r\nsuch as cameras, the outcome of which is qualitative or quantitative\r\ninformation on the bio-responses of the fish. The farmer then uses primarily\r\nsubjective experience to interpret this information, yielding a perception of\r\nthe current state and condition of the fish.
These interpretations are then used as a foundation for\r\nmaking decisions concerning farming operations and management, which are then\r\nput into action by manually induced actions on the cage. Such decisions may be\r\nmade based on the estimated present states or expected future states of the\r\nsystem, representing manual versions of the feedback and feed-forward\r\nprinciples in control engineering respectively.
Methods and tools for fish farming that apply technological\r\nsolutions and/or automation principles to one, several or all the different\r\nphases of farming operations may be considered PFF approaches. The ultimate\r\nresult of applying PFF to a particular operation will therefore be that the\r\nelements in that operation belonging to the different phases of fish farming\r\noperations are shifted from an experience-based to a knowledge-based regime\r\n(i.e. by moving from the center towards the outer edge in Fig. 1).
Status of PFF in present industry and research
Although the PFF concept has not previously been defined,\r\nmany technological research efforts and equipment innovations for the fish\r\naquaculture industry can be considered tools or components for developing PFF\r\nmethods, and in a few cases are already PFF methods in their own right. In this\r\narticle – adapted and summarized from the original\r\npublication – we provide an overview of the present status in this\r\narea, covering both industrial applications and research activities. Most\r\nrelevant methods or concepts included here address a single phase in fish\r\nfarming operations (Fig. 1), so each will be discussed separately.
Observe: Animal variables describing bio-responses
The general inability to use direct observation to make\r\nrepresentative assessments of individual and population states underwater in\r\nfish farms means that fish farmers already depend on using technological\r\nsolutions to monitor their animals. Submerged cameras are the most common tools\r\nfound on fish farms today, and are used to observe the fish during production,\r\nwith operators manually, and subjectively, analyzing behavior. Camera systems\r\nare useful platforms for automated fish monitoring by applying computer vision\r\nalgorithms to the video stream.
The possibilities within computer vision techniques are\r\nexpanding rapidly, both due to the development of enabling hardware such as\r\ncamera and computer technology, and to the increased application of these\r\ntechnologies within the consumer electronics market. Computer vision methods\r\ncan quantify several different animal variables in a fish farm setting,\r\nincluding clustering and movement, skin status, fish size, sea lice infestation\r\nlevels and behavioral changes due to exposure to chemicals.
In addition, computer vision methods could monitor important\r\nproperties of the physical environment, such as feed pellet quantities, and\r\nbehavioral expressions observable above the water line such as surface\r\nactivity. While the variation in technologies used to observe live fish in\r\nindustry is limited, the methodological diversity within research is large, as\r\nresearchers are constantly looking into new methods for collecting scientific\r\ndata. In addition to cameras, active hydroacoustic devices are the most common\r\ntechnological tools used to study fish in aquaculture research.
The most frequent application of this technology has been\r\nthe use of echo sounders to obtain echograms describing the vertical fish\r\ndistribution and schooling density in the cage, which are animal variables that\r\nmay be used to quantify the bio-response of fish to some treatment. More\r\nadvanced hydroacoustic devices are already in use within other marine industry\r\nsegments and could obtain additional animal variables from caged fish\r\npopulations. For instance, split beam sonars can estimate swimming speeds and\r\ndirections of individual fish within their sonar beam, while multibeam sonar\r\nsystems can produce data on the 3D distribution and movements of the fish.
In addition, sonar-based systems may be used to assess\r\nindividual fish sizes, given that it is possible to establish a relationship\r\nbetween the target strength of the fish and its mass or length. Passive\r\nhydrophones have also been used to provide information on Animal variables\r\nrelated to the behavior of several fish species including salmonids by\r\nrecording the sounds emitted or generated by the fish. Considering that hydroacoustic\r\ndevices (unlike cameras) are impervious to visibility conditions, this group of\r\ntechnologies could provide a useful foundation for PFF methods designed to\r\nacquire behavior-related animal variables for farmed fish populations.
Despite the considerable population sizes featured in modern\r\nfish farming, indicators of individual fish behavior may prove equally\r\nimportant in fish farming as population or group level animal variables.\r\nAcoustic fish telemetry is a method for remote sensing where individual fish\r\nare equipped with electronic transmitters containing sensors that measure some\r\nproperty in or near the fish, and that transmit raw or post-processed data\r\nwirelessly to submerged stationary receiver units using acoustic signals (i.e.\r\nsound waves). This technology is widely used for wild fish research but is also\r\nseeing increased usage within aquaculture-related research. Animal variables\r\nobserved using this technology in a culture setting include individual depth\r\nmovements, 3D positions, swimming activity levels, muscle activity levels and\r\nrespiration rates or feed intake.
Farming operations at sea are subject to natural conditions\r\nat the site, as fish kept in sea-cages are exposed to conditions strongly\r\ninfluenced by the ambient environment (e.g. weather, water currents, sea\r\nstates, temperatures, oxygen saturation, light levels and pollutants). Since\r\nmany of these factors affect the growth, development and welfare of fish, data\r\non the local ambient environment is important when selecting farming sites for\r\nsalmon production. Furthermore, farmers increasingly want to monitor such\r\nconditions at their site also during production, as this information may be\r\nused as a foundation for making decisions concerning farm management, such as\r\navoiding net manipulations when currents are strong, or reducing feeding when\r\ntemperature decreases.

Cage farming operations at sea are subject to natural\r\nconditions at the site, as fish kept in sea-cages are exposed to conditions\r\nstrongly influenced by the ambient environment (e.g. weather, water currents,\r\nsea states, temperatures, oxygen saturation, light levels and pollutants) which\r\ncan affect the growth, development and welfare of fish. Photo: Asc1733 [CC\r\nBY-SA 4.0].Such data will be useful auxiliary data for deriving PFF methods, as\r\nit is often necessary to view an observed animal variable relative to\r\nprevailing environmental conditions to derive desired feature variables. For\r\ninstance, temperature and light strongly affect the vertical movements of\r\nsalmon. Evaluating the levels of these factors is critical when seeking feature\r\nvariables that are based on depth movements, such as responses to feeding\r\nevents.
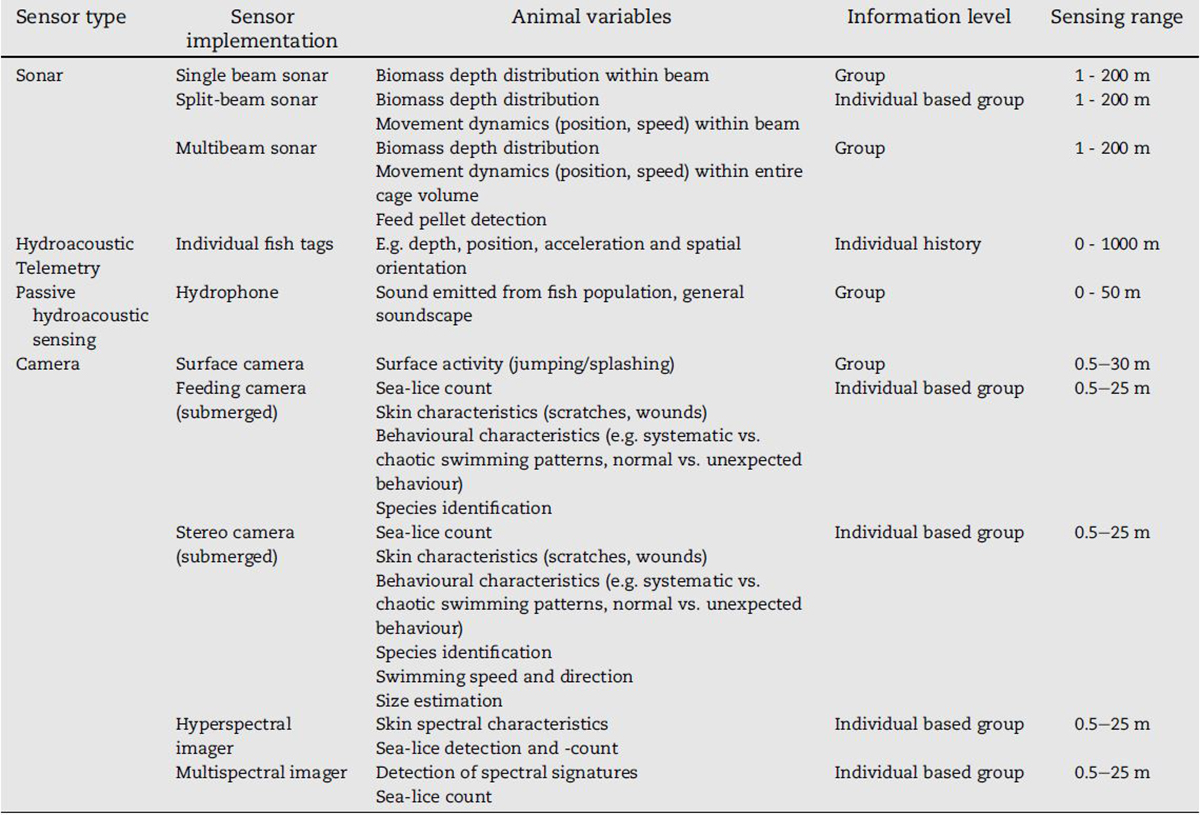
Table 1. Sensor systems and monitoring methods commonly used\r\nto observe Animal variables in aquaculture industry and research, and some\r\nproperties of these systems.
Table 1 summarizes some of the most common sensors and\r\nmonitoring methods used to observe salmon in sea-cages today, including both\r\nindustrially applied systems and solutions primarily used in research. Fig. 2\r\nillustrates how a selection of these systems would be applied in a commercial\r\ncage.
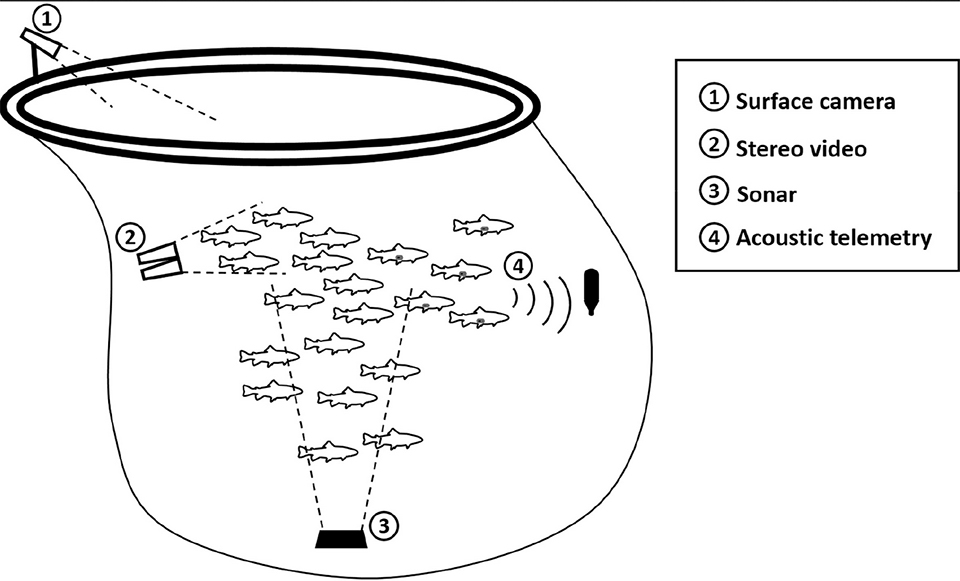
Fig. 2: Illustration of how four systems based on different\r\nmonitoring principles could be deployed in a commercial cage to observe the\r\nfish. While the surface camera (1), underwater stereo video camera (2) and\r\nsonar system (3) produce data on the fish within a sub-volume in the cage\r\n(delimited by dashed lines for each system), the acoustic telemetry system (4)\r\nmay collect data on the individual fish carrying acoustic transmitters\r\nirrespective of their location in the cage.
Interpret: Feature variables from animal variables
In the fish farming industry, the interpretation of animal\r\nobservations is mainly conducted by individual farmers based on personal\r\nexperience. Although ongoing innovations aspire to automate this process (e.g.\r\nsystems for remote feeding operations that aggregate and present relevant data\r\nfrom different sources), the existing industrial foundation for automated\r\ninterpretation of Feature variables is less established than it is for the\r\nacquisition of Animal variables. However, this also means that the unreleased\r\npotential for developing new PFF methods in this area is considerable. As\r\nproduction from the cage-based fish farming industry has increased, so has the\r\nextent of the research into obtaining a better understanding of the processes\r\noccurring in farmed populations. Aggregated knowledge on the different\r\nsub-mechanisms and bioprocesses occurring in commercial sea cages is therefore\r\nrapidly expanding.
However, before this knowledge can be put to use for\r\ndecision support on a cage level, it needs to be structured to provide\r\ninformation relevant for the processes occurring in the cage. Mathematical\r\nmodelling of systems dynamics is a tool commonly used for such inference,\r\nstructuring and aggregating knowledge by synthesizing information from\r\ndifferent subsystems into a complete system representation. A mathematical\r\nmodel of a dynamic system can often predict how the system will respond given a\r\nspecific set of inputs and may estimate features of the system that are difficult\r\nor impossible to measure directly. In aquaculture research, mathematical models\r\nexist to estimate fish growth and behavior. Such models are good candidates as\r\na foundation for PFF-methods aimed at interpretation, as they could predict or\r\nestimate properties of the fish based on measured inputs.
These inputs will often include various types of auxiliary\r\ndata (e.g. environmental measurements, feed delivery and feeding schedules)\r\nrequired to drive the model dynamics but may also include measured animal variables\r\nthat the model could then convert into feature variables more useful for\r\ndecision support. For instance, a recent study sought to estimate the economic\r\nyield of a production operation by combining a model of sea bream growth with\r\ntemperature as input with simulations of sales plans and strategies. Another\r\nexample of such use of mathematical models could be to use a mathematical model\r\nto estimate feature variables such as the feeding activity of the fish, the\r\ndistribution of waste material in the water, or vertical fish swimming speeds\r\nbased on animal variables such as vertical distribution obtained with an echo\r\nsounder as input.
Mathematical models representing elements of the environment\r\nin production units also exist, covering subjects such as spatial and temporal\r\nfeed distribution in sea-cages. If provided with sufficiently good input data,\r\nsuch models could estimate feature variables not directly associated with the\r\nfish but rather with the production environment.
The use of mathematical models to estimate unobserved states\r\nin complex systems has a long history within control engineering and is\r\nrealized by including the mathematical model into an observer structure, either\r\nbased on statistical methods or by using non-linear observer methods. Such applications\r\nallow the combination of existing knowledge (through mathematical models) with\r\nreal-time data from sensors to provide better estimates than it is possible to\r\nobtain with either sensors or models alone.
Since caged fish production is a predominantly biological\r\nprocess, it is more difficult to measure the different states and processes\r\ndirectly than in more technically oriented industries. By this reasoning, it is\r\nlikely that extensive use of estimators based on mathematical models will be\r\nnecessary components when deriving the PFF methods of the future, as precision\r\nfarming will require a better foundation for information than is available\r\nthrough present monitoring methods.

Automated feeding is well-established in various fish cage\r\nproduction sectors like sea bream and salmon. However, when fish farming\r\noperations are moved to more exposed and remote areas, limited human access\r\nwill increase the need for autonomy in central tasks such as feeding. Photo by\r\nDarryl Jory.
Decide: Target variables from feature variables
All important decisions in present day fish aquaculture are\r\nmade by humans based on the interpretation of observations of the fish and\r\nother cage processes based on personal experience, and the use of protocols,\r\nlegislation and recommendations on farm management. This will probably still be\r\nthe case in the near future for fish farming operations, as making the “right”\r\ndecision is a complex task that is difficult to assign to computer-based\r\nsystems without running a risk of unforeseen and potentially undesirable side\r\neffects (e.g. suboptimal feeding due to limited data on fish responses).\r\nHowever, when fish farming operations are moved to more exposed and remote\r\nareas, limited human access will increase the need for autonomy in central\r\ntasks such as feeding.
Limited human presence also means that decision-making\r\nprocesses need to be at least partly automated. Although there exist no systems\r\nfor automated decision making or decision support that are operative within the\r\naquaculture industry, advances in artificial intelligence and information\r\ntechnology have led to the development of Decision Support Systems (DSS). A DSS\r\nis a computer tool that for a given situation or problem combines inputs (e.g.\r\nfrom sensors or mathematical models) and historical user experiences (i.e. from\r\nsimilar situations or problems previously experienced) into compound output\r\nvalues. DSS methods are used in several industries, including oil and gas,\r\nfinance and medicine.
An example of research that aspires to go in the direction\r\nof DSS for fish farming is found in the proposed concept of using the fish as\r\nbiological warning systems for monitoring seafood safety. Fish would be\r\nmonitored online using technological methods (e.g. computer vision) to detect\r\natypical behavior or responses in the fish that imply that the animals are\r\naffected by external perturbations, possibly indicating e.g. the presence of\r\nnoxious substances.
Act: Manipulating system and eliciting desired bio-responses
Most actions that incite bio-responses at fish farms are\r\nmanually controlled and often include the manual operation of mechanical\r\nequipment (e.g. winches, cranes, crowding nets and ropes). The task of\r\nconverting a specific decision into the proper control signals or physical\r\nactions that elicit the desired response is assigned to a human operator. An\r\nimportant exception from this is the centralized feeding systems employed at\r\nmost commercial fish farms. These systems are designed to convert decision\r\nlevel inputs such as cage specific feeding rates and feeding time schedules\r\ninto the electrical signals (e.g. blower frequency, feed sluice opening rate\r\nand feed hose selector) required for the feeding process to achieve the desired\r\nsystem response.
In earlier days, most of the necessary underwater actions at\r\nfish farms were conducted by divers. Today it has become common to use remotely\r\noperated vehicles (ROVs) for such tasks, greatly reducing the risks of\r\npersonnel injuries. Although ROVs are most often controlled by human pilots,\r\nrecent research has demonstrated the possibility of using acoustic positioning\r\nmethods and computer vision-based systems to improve the navigation of ROVs in\r\nand around cages, increasing the precision in remote operations. The use of\r\nthis type of technology could also be extended to Autonomous Underwater\r\nVehicles (AUVs) that move without human interference, and that could in turn be\r\nequipped to conduct minor repairs and other underwater tasks autonomously. AUVs\r\nhave been used for different purposes within several industries, including\r\nhydrographic surveys, inspections and prospecting for oil and gas applications,\r\nship hull inspections and military applications.
Closed-loop PFF applications
At present, there are no examples of systems that may be\r\nbranded closed-loop PFF applications in farm-based fish aquaculture,\r\nencompassing the span from observing animal variables to actuation that elicits\r\na bio-response in the fish. However, as the general level of technology in the\r\nworld increases, the equipment commercially available to the fish farming\r\nindustry also becomes more technically advanced and better able to handle more\r\ncomplex tasks. For instance, devices such as biomass frames may be argued to\r\ncover both the observe and interpret phases in the farming cycle (Fig. 1), as\r\nthey optically scan the fish, estimate individual volumes based on the scanning\r\ndata, and then estimate weight distributions based on these numbers. There are\r\nfew examples of solutions that seek also to cover the decide and act phases,\r\nwhich often entail human intervention.
However, there are examples of such initiatives within\r\nresearch on live feed production, where different cybernetic methods (i.e.\r\nmathematical modelling, sensor technology and automated control) have been\r\nsuccessfully applied to automatically control feeding and culture growth.\r\nAlthough this industrial segment differs greatly from cage-based fish farming\r\nin both scale and facilities, both are focused on the husbandry of live aquatic\r\nanimals, and since such methods are possible to develop for live feed\r\nproduction, similar approaches may apply to farm-based fish production. This\r\npotential is even greater for land-based production of fish in onshore tanks,\r\nwhere the ability to control core aspects of the production environment (e.g.\r\ntemperature, oxygen, flow) is substantially higher than for cage-based production.
Challenges for industrialization
Many of the technology principles that are potential tools\r\nin the fulfillment of industrial PFF applications have been used industrially\r\nand commercially in other market segments, and several have also seen some use\r\nwithin aquaculture. However, for many of these, there exist specific technical\r\nchallenges related to the basic physics of the subsurface environment,\r\nproperties pertaining to the selected sensing methods, or limitations of\r\ncommunication protocols when used in a fish farm setting. These challenges need\r\nto be overcome before a full step towards commercial exploitation in\r\naquaculture is possible. Potential methods to handle such challenges may range\r\nfrom the implementation of new product features, through adjustment of system\r\nsettings, to more strategic equipment placement (Table 2).
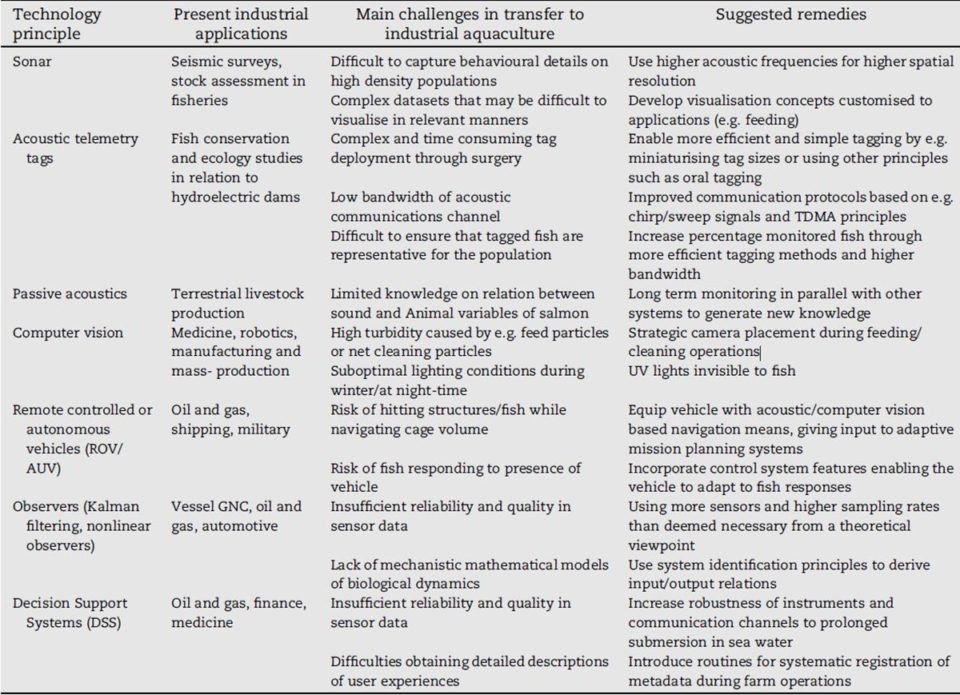
Table 2. Technology principles that are industrially applied\r\nin other segments, and the main challenges of introducing these to industrial\r\naquaculture.
Acknowledgements
\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n\r\n
This study is the result of a strategic collaborative effort\r\nbetween the participating institutions and has not been funded through external\r\ngrants. We dedicate this work to the late Professor Jens Glad Balchen\r\n(1926-2009) who first established the idea of applying cybernetic methods to\r\nthe production and capture of aquatic organisms.
Source : Global Aquaculture Alliance
Ditulis oleh
Tim Minapoli
Kontributor
Pakar di bidang akuakultur dengan pengalaman lebih dari 15 tahun. Aktif berkontribusi dalam pengembangan industri perikanan Indonesia.